Functions accessible from: 'Main menu > Settings > System > Compass'
Before getting out with your GPS it is very important to properly calibrate the device so that it offers accurate data. The default setting usually offers the best results for most users. The electronic compass must be manually calibrated whenever it detects inaccuracies in its operation:
•Take bearing from: Your device offers you different ways to determine the bearing you are taking during your navigations:
•GPS: The latest positions received are used to calculate the bearing of your current movements. As soon as you stop, this reference will not be reliable because there will be no reliable movements to calculate the bearing.
•Compass: Data recorded from the compass will be used in order to determine the orientation of the device.
•Automatic (recommended): Data recorded from the compass will be used (if driving slowly) while GPS position will be used (if driving fast).
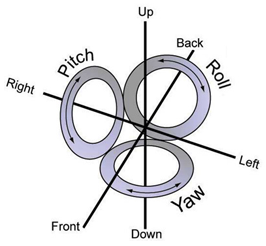
•Calibrate compass: The calibration of the electronic compass is essential in order to display right directions during your navigations. After pressing the button, follow the steps shown on the screen. Rotate the device for a few seconds to do the calibration. It is important to move the device about all 3 axes of rotation. This effect can be achieved in 2 ways:
•Figure-8 motion: Not a flat figure-8. The device must be rotated while moving it to capture readings in all 3 axes.

•Sequential rotation about the 3 axes:
|
| |
|
|
X-axis: Longitudinal (yaw)
Y-axis: Vertical (roll)
Z-axis: Transversal (pitch) |
IMPORTANT: The electronic compass is an instrument very sensitive to weather conditions and magnetic fields. Calibration must be carried out in the open air and far from sources of alterations of the magnetic fields, such as cars, buildings or electric lines.