ABCDEF
AZERTY
QWERTY
Urządzenie TwoNav posiada tryb 'Zaawansowane', umożliwiający pewne dodatkowe funkcje, które nie są często używane, a które mogą przysporzyć systemowi dodatkowej złożoności:
•Klawiatura: Ustaw układ aplikacji klawiatury.
|
|
|
|
|
|
|
|
|
ABCDEF |
AZERTY |
QWERTY |
•Informacje w wykazie punkty trasy/ślady: Wyświetl więcej inforamcji na temat elementów listy. Dodatkowe informacje wyświetlane będą, w drugiej linijce, zaraz pod nazwą pozycji. Wybierz obszary danych, które chcesz wyświetlić.
|
|
|
|
| |
•Tryb aktywnych punktów trasy: Ustaw tryb pracy na Pliki Aktywnych Punktów trasy:
•Podstawowy: Ustalony Aktywny Plików Punktów trasy + załaduj przy starcie.
•Zaawansowany: Pierwszy otwarty punkt trasy będzie aktywny i nie będzie ładowany przy starcie.
•Kliknij na Następne Zdarzenie: Ustaw domyślny punkt docelowy po włączeniu funkcji ‘Następne Zdarzenie’.
|
|
|
|
| |
•Podczas uruchamiania wczytuj obiekty otwarte poprzednio: Proponuje cel, który został ustawiony podczas zamykania ostatniej nawigacji.
•Aktywuj czujniki na starcie
|
|
|
|
| |
•Wyskakujące okno alarmów: Ustaw czas wyświetlania okieniek alarmu.
|
|
|
|
| |
•Animowane drzewo danych: W momencie zarządzania elementami na jednej z list, TwoNav wyświetli animowany efekt, dzięki któremu łatwo zobaczysz, na którym elemencie aktualnie pracujesz.

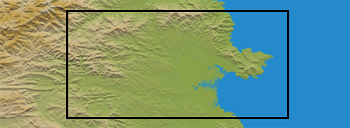
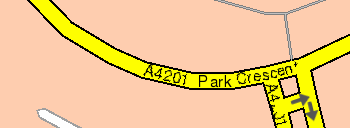
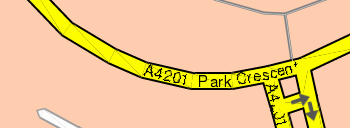
•Oznacz narożniki mapy: Pokazuje ramy dostępnych map w oknie nawigacji.
|
|
|
•Linie w Info Następne: Wprowadź ile lini zostanie wyświetlonych w funkcji ‘Info Następne’.
|
|
|
|
|
|
•Przybliż podwójnym kliknięciem
•Trwały przycisk zbliżania
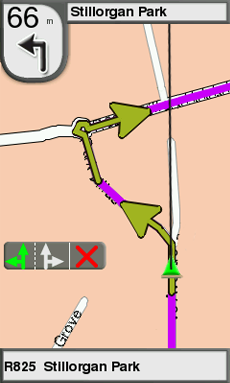
•Informacje o pasach ruchu (tylko w trybie ‘On-Road’): Na drogach z wieloma pasami, zostanie wyświetlona informacja o zajęciu prawidłowego.
|
|
|
|
| |
•Anti-aliasing: Technologia pozwalająca uzyskać płynniejsze linie map wektorowych (*.VMAP).
|
|
|
•Wygładzanie: Urządzenie TwoNav oblicza odchylenia zapisu GPS i wyświetla wygładzoną trasę, aby pokazac łagodniejszy ruch oraz umożliwić lepsze odbieranie prędkości w odniesieniu do terenu. Po włączeniu tej funkcji będziesz mógł obliczyć dokładną odległość i moment przeprowadzenia manewru.
Funkcja ta uwzględnia systemowe opóźnienia sygnału za pomocą przewidywania pozycji GPS, dzięki czemu twoja pozycja jest pokazywana niemal w czasie rzeczywistym.
•Profil Tryb ‘On-Road’/‘Off-Road’: Tryb ‘On-Road’ i ‘Off-Road’ mają różne wymagania, dlatego TwoNav wyświetla inne opcje dla każdego trybu. Jeśli urządzenie jest rozłączone, wszystkie opcje (menu i obszary danych) będą takie same dla obydwóch trybów.
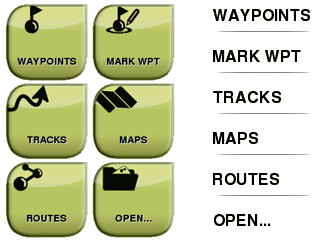
•Wykaz menu: Wybierz z pomiędzy kilku trybów aby wyświetlić submenus:
•Wykaz menu: Opcje są wyświetlane na liście ciągłej.
|
|
|
|
•Przycisk menu: Jeżeli widocznych będzie więcej opcji, niż mieści się na ekranie, poniżej pojawi się więcej kart.
•Nawigacja statyczna: Czip wbudowany w GPS ma wprowadzoną minimalną wartość prędkości, która będzie uznawana za ruch. Prędkości poniżej tej wartości nie będą uznawane za ruch. Ta wartość jest ustawiona domyślnie i nie może zostać przez ciebie zmieniona.
•Minimalna różnica by zsumować wysokość: Ustaw minimalną wartość wysokości, wysokości poniżej ustalonej wartości nie będą rozpatrywane jako wzrosty.
|
|
| |||
|
Minimalna różnica by zsumować wysokość: 5 m |
Bieżąca wysokość: 4.7 m |
à |
Uwzględniany wzrost: 0 m | |
|
Bieżąca wysokość: 5.2 m |
à |
Uwzględniany wzrost: 5.2 m | ||
•Minimalna prędkość w ruchu: Pole które ustawia minimalną prędkość przy której wykrywany jest ruch. Prędkości nie przekraczające tej wartości nie będą uznawane za poruszenia.
|
|
| |||
|
Minimalna prędkość w ruchu: 0.8 km/h |
Bieżąca prędkość: 0.5 km/h |
à |
Uwzględniany wzrost: 0 km/h | |
|
Bieżąca prędkość: 1.4 km/h |
à |
Uwzględniany wzrost: 1.4 km/h | ||
•Zrzut ekranu tworzy punkty trasy: A punkt trasy z towarzyszącym mu obrazkiem jest tworzony za każdym razem, gdy wykonujemy zrzut ekranu (obrazek będzie zapisany w folderze: ‘TwoNavData/Data’).
|
|
|
|
| |
•Styczna strzałki GOTO: Wyświetli się strzałka (GOTO), pokazująca kierunek styczny do ślady. Wprowadź tu odległość, która będzie używana do obliczenia stycznej wyznaczającej kierunek.
•Opuść punkty trasy po: Jesli trasa ma punkty, nawigacja przeskoczy do następnego punktu po opuszczeniu ostatniego. Ten parameter pokazuje jak dużo dystansu pozostało.