ABCDEF
AZERTY
QWERTY
Depuis le 'Avancé’, vous aurez accès à certaines fonctions extras peu utilisées:
•Clavier: Choisir votre clavier.
|
|
|
|
|
|
|
|
|
ABCDEF |
AZERTY |
QWERTY |
•Information sur la liste de waypoints/traces: Afficher plus d'informations pour l'élément listé. L'information extra sera listée sur une 2nde ligne. Sélectionne les données que vous souhaitez afficher.
|
|
|
|
| |
•Mode waypoints actifs:
•Basique: Waypoint actif fixe + chargé au démarrage.
•Avancé: Le premier waypoint ouvert est l’actif.
•Clic sur Prochain Évènement: Sélectionnez la destination par défaut.
|
|
|
|
| |
•Récupérer les données au démarrage: Charger les mêmes données que celles-qui ont été chargées lors de la dernière fermeture de l’application.
•SEULEMENT DISPOSITIFS ANT+™: Activer les capteurs au départ
|
|
|
|
| |
•Pop-up pour alarmes: Définissez une durée d'affichage pour la fenêtre d'alarme.
|
|
|
|
| |
•Animation arbre de données: Lors de la gestion de listes d’éléments, TwoNav lance un effet animé vous permettant de voir facilement sur quel élément vous travaillez actuellement.
|
|
|
|
| |
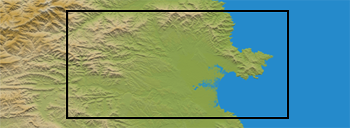
•Afficher cadres pour les cartes: Afficher les cadres des cartes disponibles dans la fenêtre de navigation.
|
|
|
•Couleur de fond: Définir la couleur de fond de la fenêtre principale.
|
|
|
•Lignes Info Suivante: Entrez le nombre de lignes que vous souhaitez voir apparaître depuis la fonction ‘Info Suivante’.
|
|
|
|
|
|
•Zoom avec double clic
•Zoom permanent en cliquant
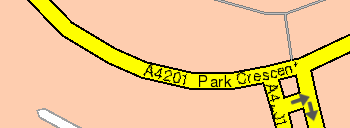
•Information de voie (seulement navigation on-road): Si la route propose plusieurs voies, vous serez informé de celle qu’il faut prendre.
|
|
|
|
| |
•Anti-aliasing: Dessine des lignes plus agréable pour les cartes vectorielles (*.VMAP).
|
|
|
•Zones de fonds: Si activé, seule les contours de profondeurs seront affichés.
|
|
|
•Navigation statique: La puce du GPS nécessite une valeur minimale pour considérer que vous êtes en mouvement. Les vitesses inférieures à cette valeur ne seront pas considérées comme un mouvement. Cette valeur est définie par défaut, il ne peut pas être modifié.
•Filtre de distance: Définir la distance minimum considérée comme un mouvement. Les distances inférieures à cette valeur seront simplement ignorées par le logiciel TwoNav. Cette fonction évite l’enregistrement de petits déplacements dûs à des erreurs du GPS.
•Altitude accumulée minimum: Fixez ici l'altitude minimum qui sera considérée comme une augmentation d'altitude. Les altitudes en dessous de cette valeur ne seront pas considérées comme une augmentation.
|
|
| |||
|
Altitude accumulée minimum: 5 m |
Altitude actuelle: 4.7 m |
à |
Augment. prise en compte: 0 m | |
|
Altitude actuelle: 5.2 m |
à |
Augment. prise en compte: 5.2 m | ||
•Vitesse de déplacement minimum: Ce champ permet de fixer la vitesse minimum qui sera considérée comme un déplacement. Les vitesses inférieures à cette valeur ne seront pas considérées comme mouvements (mais comme un déplacement à 0 km/h).
|
|
| |||
|
Vitesse de déplacement minimum: 0.8 km/h |
Vitesse actuelle: 0.5 km/h |
à |
Augment. prise en compte: 0 km/h | |
|
Vitesse actuelle: 1.4 km/h |
à |
Augment. prise en compte: 1.4 km/h | ||
•Captures crée waypoint: Un waypoint avec une image associée sera créé à chaque fois qu’une capture d'écran est réalisée (l'image sera sauvegardée dans le dossier ‘TwoNavData/Data’)
|
|
|
|
| |
•Pointeur d’animation: L’icône qui marquera votre position dans la carte dans les simulations.
|
|
|
|
| |
•Flèche GOTO tangente à: la flèche GOTO montre la direction de la prochaine section de la trace. Ce paramètre représente la distance servant à calculer la tangent pour donner la direction.
•Sortir waypoint après: Si une trace/route contient des waypoints, la navigation passera au suivant une fois le précédent atteint. Entrez ici la distance nécessaire pour passer au suivant.
|
|
|
|
| |
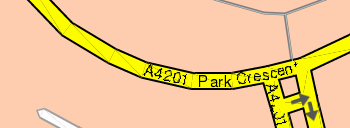
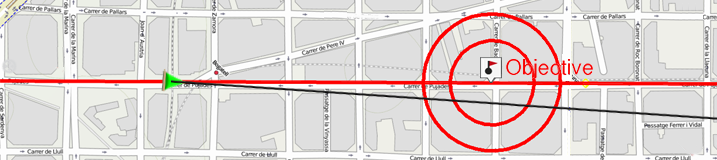
•Objectif atteint à: Distance minimale à partir de laquelle TwoNav considère un objectif comme atteint.
|
|
|
|
| |